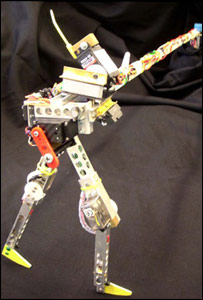
�й�������Ϣ����Ӣ���㲥��˾��������Ӣ��˹�����ѧ������ʿѧλ�Ļ���ѧ�߹���������Ƴɹ���������һ��˫��ֱ�����ߵĻ����˨D�DRunbot�����Һ��������������ٶȲ�ࡣ
������һ�ɹ�������������һ�ڵġ���������ѧ����ͼ����ڿ����ϡ�
������������һ��Ӣ����ʦ��һλ�¹����ڵ�ָ���������һ�о��ġ���һ�ɹ���ͻ���������ڣ����ֱ��˫�Ȼ����˵�����ԭ��������һ�������Ҿ�����Ӧ����״����ѧϰ������
�������ε��о�������20����30��������˶�����ѧ�������������˹̹�ġ��˶��о�������ԭ�����൱�ڿ����۵ġ����������
���������˵�ֱ������һֱ�ǿ�ѧ���Ǿù����µ����⣬Ҳ��ʵ�ֻ����ˡ����桱�Ĺؼ�һ����
���������ⷽ����о���Ȥ�������˶���������ģʽ���о��������˺ܶ�����ѧԭ����
������ͳ�Ĺ۵���Ϊ��Ҫ������һ�����ߣ������˱�����һ����ʱ����ƽ��Ͳ�������ġ����ࡱ��
�����ų��������Ƚ����л����˵��ձ����﹫˾Asimo�������ࡰ��̬ƽ�⡱�����ˣ���Ҫ��ʱ����ÿһ����ƽ�⣬������·���Ǿ����еġ���������
���������ݲ���˹̹��һ�ȱ��������Ĺ۵㣬�Ȳ��ġ��ֲ����䡱���Ǵ��Եġ�������ơ����������������������á�
���������ϸ�۲죬���������ʵ����һ����������ǰ���������ֲ���֧���Լ��Ĺ��̡�
����������һԭ�����������ѧ�������Ƴ���һ����������ॺ�ॡ���е�ȣ��ܹ������µ����������ߡ�������
������ι����Ƴ���Runbot�����Ժ���һ����ǰ�š�̧��ţ��������ߣ����Ҳ��ٿ��Դﵽÿ��3.5���ȳ������������������ٶȲ�࣬Ҳ�����е�˫�Ȼ����˲��ٿ�һ�����ϡ�
����������עĿ���ǣ�30���ߵ�Runbot���˿��Ȳ��Ĺؽڡ���������������֮�⣬������ͨ�������ԡ�����ѧϰ���жϲ���Ӧ���Ρ�
�������в�����ǣ�Runbot������ʵ����������ƽ�⣬��Ҫǣ������������㵹��
���������εijɹ�����ʹ��������˵��о���ǰ�������ش�һ����Ҳ���Լ�������̱�����˵������ṩ�����